
VIDEO: The Trolley Problem
- Kevin

- May 7, 2021
- 2 min read
Updated: Feb 16, 2024

Trying to come up with the best robot attachment for the obstacle course has been tricky, but we think we've worked it out.
Our robot has two big wheels, and two swivel wheels ("trolley wheels" we call them). The two big wheels have the power. The little wheels are just there to roll and let the robot go where the big wheels need them to go.
The big wheels are thin, which means they don't get a lot of traction and sometimes slip. We thought: what if we had a mechanism that swapped out the thin wheels with some fat wheels? So we built this thing:

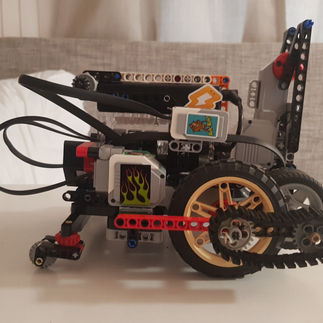




The upright motor at the front pushed down the fat wheels when we needed them, and pulled them up when we wanted to go fast again.
But... it didn't help.
The bigger problem was with the trolley wheels. The trolley wheels are fine on smooth floors, which is fine because three challenges are on smooth floors, but they sometimes get snagged on tiny bumps. The obstacle course is going to have bumps that are way bigger.
So, we took it all apart and built it again, but with the big fat wheels on the trolley end this time:.






This works so much better.
It raises the body of the whole robot higher off the ground
It provides power to all wheels on the ground (4 wheel drive).
The switch also works as a step or hoist to get the robot up a high ledge.
The only downside is that when the big wheels are down, it can only go forward or backward. It can't really turn all that well. But, when it's time to turn, just drop the trolley wheels down again.
Here's a test of the new 4 wheel drive system in action. We think it's pretty sweet.



Comments